Insert HTML here
Insert HTML here
GUMPS Program Overview
Program Summary:
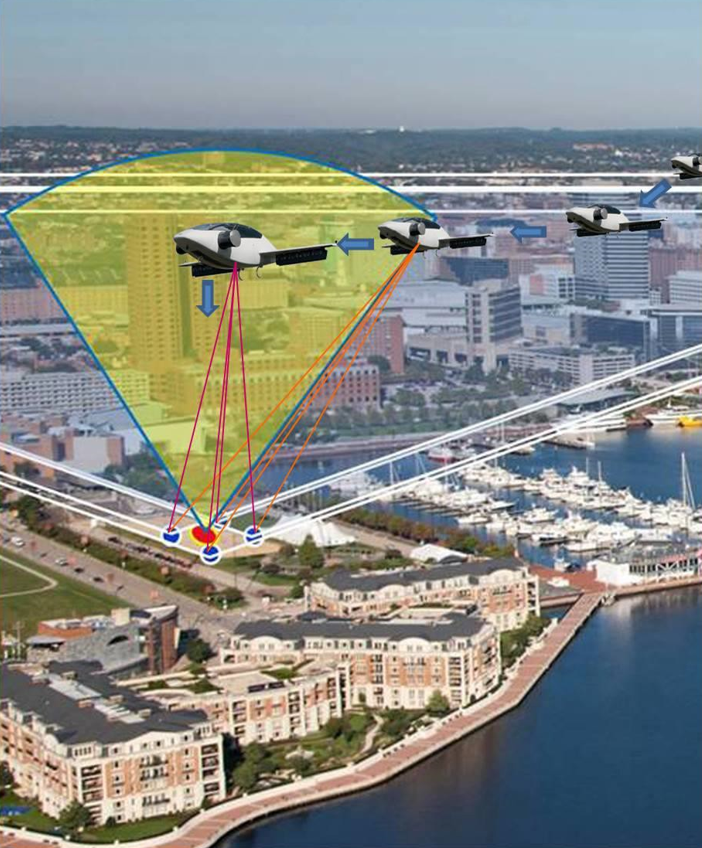
The GUMPS program is a radar-based ultrawideband positioning system designed to support Urban Air Mobility in GPS-denied environments. UTS led a NASA SBIR Phase I feasibility study, now transitioned to Phase II, to assess a radar-based multistatic positioning system for GPS-denied airspace. GUMPS supports Urban Air Mobility (UAM) by providing precise, low-cost guidance for Vertical and Steep Takeoff and Landing Areas (TOLAs). Designed to enable independent VTOL navigation and GPS integrity monitoring, GUMPS uses open-form analytical models and simulations to validate performance, with future development focused on hardware prototyping and field testing.
Start Date:
2020
End Date:
2023
Primary Client:
NASA SBIR – Phase II
Supported Units:
NASA Aeronautics/UAM Programs
VTOL/UAM system developers
Airspace regulators (MAA)
Locations:
Remote/Simulation Based
Planned field testing in Phase II (with URF and MaXentric)
Program Scope:
The GUMPS program was first developed as a feasibility concept for radar-based navigation in GPS-challenged environments. Phase I centered on simulation and analytic modeling to validate positioning accuracy across UAM and TOLA parameters. In collaboration with University Research Foundation, MaXentric Technologies, MAA, and L3Harris, the project advanced from concept into Phase II development, integrating radar-based threat detection for non-cooperative targets such as UAVs and birds.
Service Areas:
R&D
Data & Cloud Systems
Cybersecurity
Program Management
Facility Type:
Urban Air Mobility (UAM) Airspace, VTOL Landing Zones